针对混合交通流环境下的智能网联车辆协同决策控制问题,团队创造性的提出了混合交通流协同决策控制的理论框架、模型与解法,用于减少甚至有望从根本上消除交通冲突。同时将复杂状态约束最优控制的轨迹规划问题嵌入到车辆排序问题中,并设计了系列算法进行高效、快速求解。50辆车规模的协同决策控制问题的求解速度降低到10-20ms级别,基本满足实时应用的需求。
满足系统效率的协同决策控制理论框架
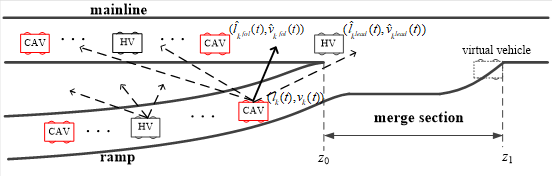
匝道汇流应用场景
仿真结果分析:针对混合交通流环境下的智能网联车辆协同决策控制问题,团队创造性的提出了混合交通流协同决策控制的理论框架、模型与解法,用于减少甚至有望从根本上消除交通冲突。同时将复杂状态约束最优控制的轨迹规划问题嵌入到车辆排序问题中,并设计了系列算法进行高效、快速求解。50辆车规模的协同决策控制问题的求解速度降低到10-20ms级别,基本满足实时应用的需求。
1、道路通行能力随着自动驾驶车辆渗透率的提升而增加(最高可提升20%)
2、在自动驾驶车辆高渗透率情况下,匝道协同汇流策略可进一步提升10%-15%的通行能力。
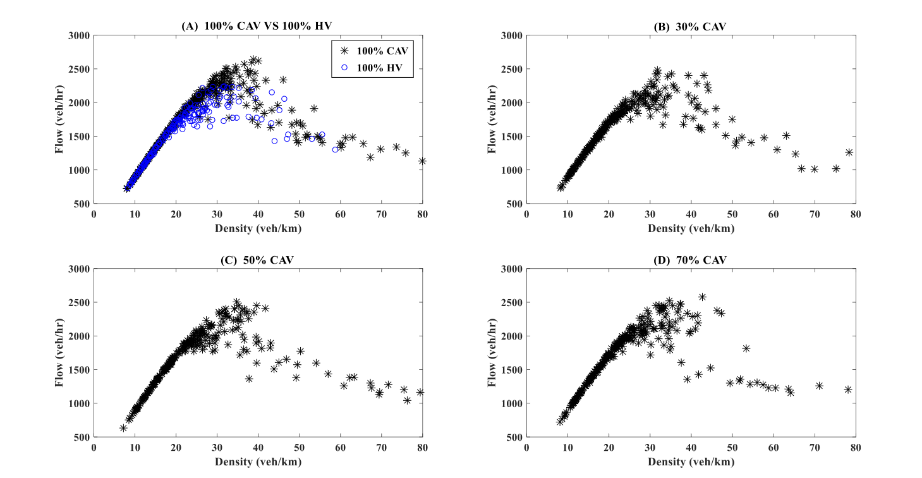
流量密度图
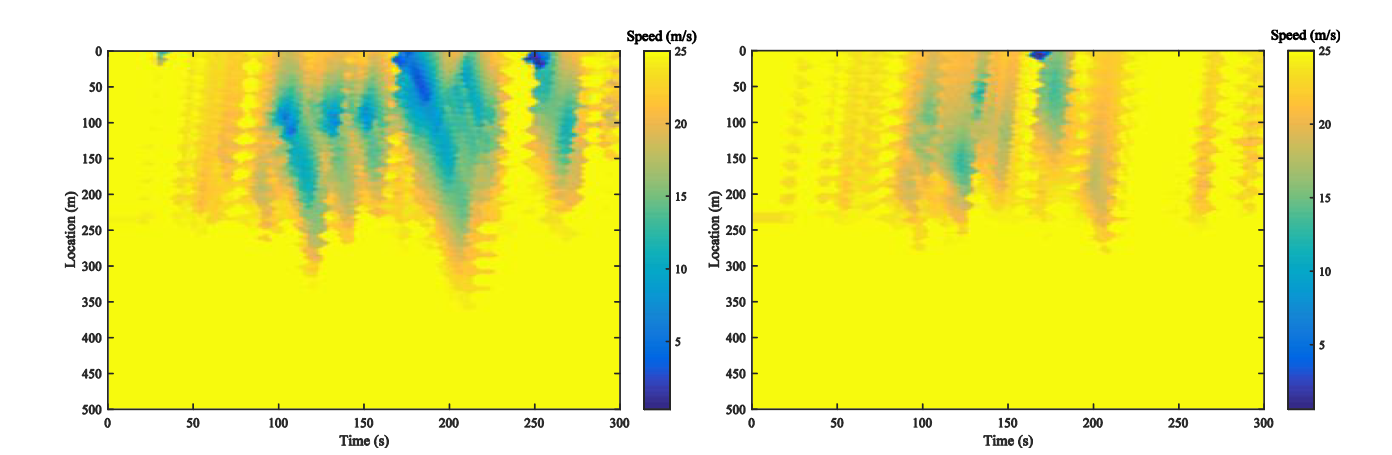
速度轮廓图:非协同控制VS协同控制
驾驶风格分析在交通流性能建模和自动驾驶汽车设计控制中都起着关键作用。在驾驶风格分类技术中,重要的是要解决监督学习方法中标记大量数据这一困难,以提高驾驶风格分类的性能。本项工作开发了一种半监督方法,即多类半监督支持向量机(S3VM),用于汽车跟驰行为中的驾驶风格识别。实验结果表明,在不同数量的标记数据下,基于S3VM的分类器优于基于SVM的分类器。这表明在驾驶风格分类方面,车辆性能参数和跟驰模型参数之间存在可预见的联系。这种一致性可以为基于异质性的驾驶行为建模提供先决条件。
车辆跟驰行为异质性建模
通过主成分分析和聚类分析方法,获得驾驶风格的聚类结果。可以清楚地将驾驶风格分为正常型、激进型和温和型三种。从模型的验证结果可以看出所提出的模型能够明显降低各种驾驶风格行为预测的误差,REMS值由0.7降低至0.4左右。

聚类结果
共享背景下自动驾驶汽车的停车选择均衡
本研究在共享停车机制下,确定城市中各区域、各时段的停车设施车位共享的供给数量和价格,在此停车容量约束条件下,考虑自动驾驶汽车异质用户的时间价值不同和停车需求异质性,对出行路径、停车选择等行为带来的用户出行成本进行建模。基于上述的用户出行成本模型,从网络分析的角度建立自动驾驶汽车的出行和停车联合选择均衡模型,构建等价的变分不等式模型,分析所建立的网络均衡模型的数学性质,通过关键的系统变量和参数对均衡的影响来分析共享停车的比例和价格对城市中心和外围的停车资源利用情况和时空分布的影响。
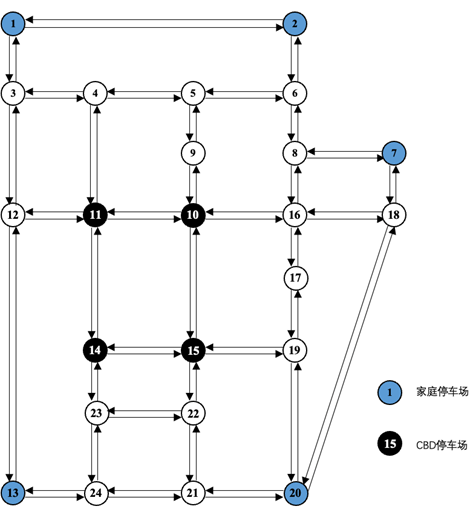
Sioux Ealls测试网络
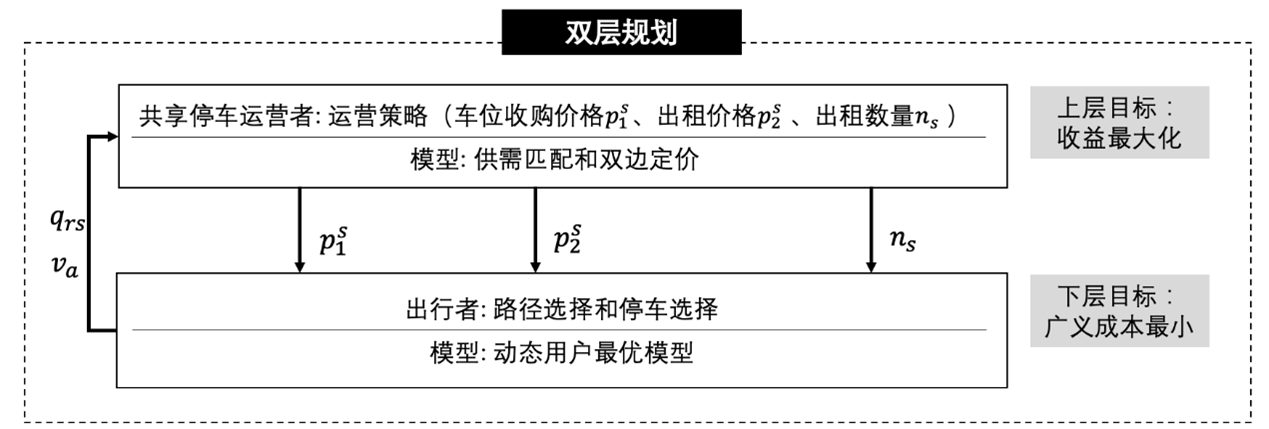
双层规划模型结构
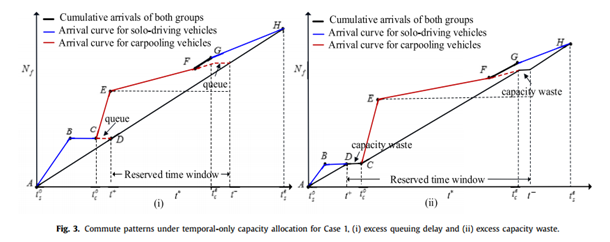
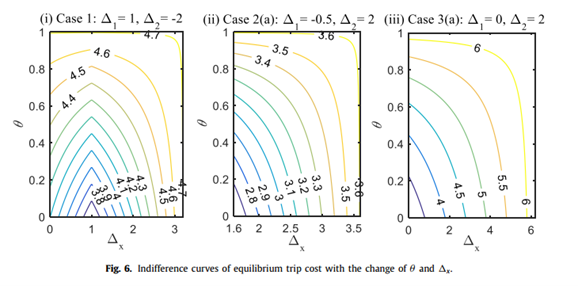
混合交通环境下早通勤问题的出发时间和停车选择
拼车作为一种需求管理措施,可以有效缓解高速公路拥堵。拼车车道和通用车道之间瓶颈容量的适当空间分配可以降低系统的总出行成本,然而尚不清楚瓶颈容量的时间分配是否也有效,如果有效,会有什么影响,以及瓶颈容量的时间-空间分配的综合影响会是什么。本项工作研究了瓶颈容量的时间分配(拼车车道仅在预留时间窗口内可用)和联合时空容量分配对早晨通勤模式的影响。结果表明,最佳容量分配对通勤者额外拼车成本的准确估计很敏感。
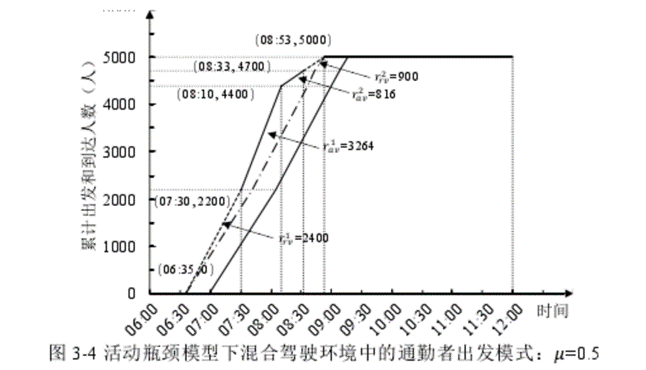
错时上班制及动态停车费影响下的自动驾驶用户全天通勤问题
自动驾驶用户的全天通勤问题涉及交通流的预测与管理,这个领域关注个人和集体出行行为的选择、模式和影响因素,因此也涉及到对出行行为和决策过程的分析和建模。这是交通系统的规划与设计的重要研究内容。
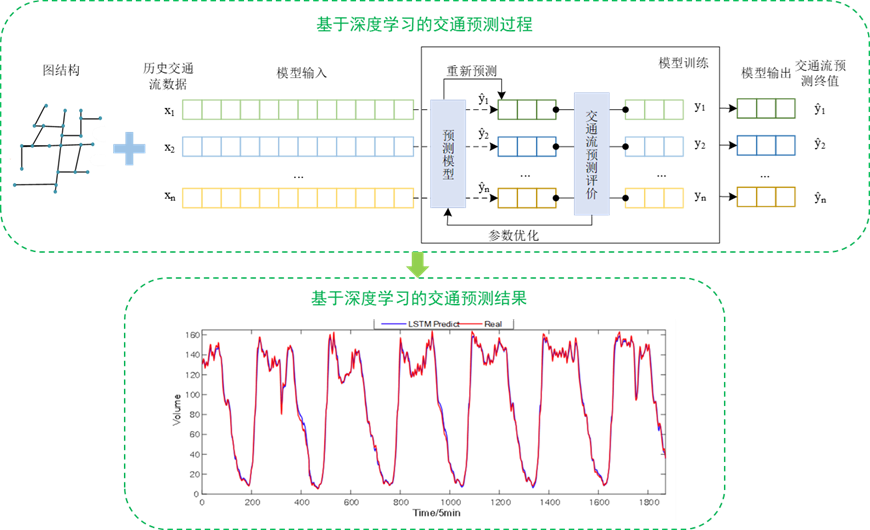
城市空间结构的快速发展对城市动态性和城市居民的出行模式具有显著影响。本研究首先预处理出租车GPS轨迹数据,并基于城市地理特征与空间结构,结合城市道路特征,设计了城市交通知识图谱网络。其次,通过构建知识感知模型,提取交通道路的静态与动态特征,利用多头注意力机制网络分析交通道路最具贡献力特征,最后,基于深度学习聚类方法提取交通拥堵模式。

城市交通知识图谱构建
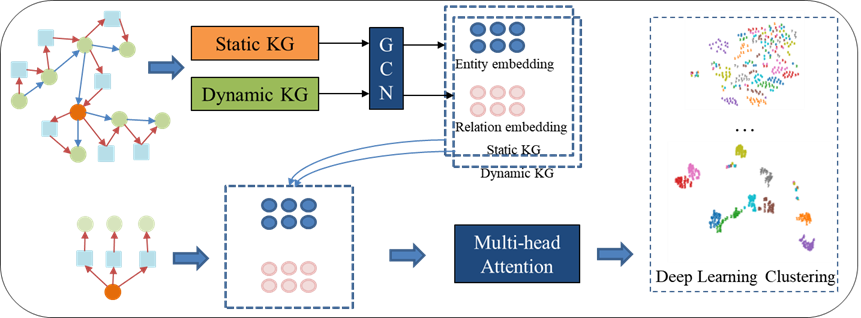
基于知识感知的深度学习聚类模型
在交通拥堵管理领域,动态定价是一种有效的交通需求管理策略。本研究基于宏观基本图、点排队模型,设计一种协调的动态定价方案,用于解决多区域和多模态网络中的交通拥堵问题。通过合理的定价策略,提高交通网络的运行效率和出行体验,优化资源配置,促进可持续发展。
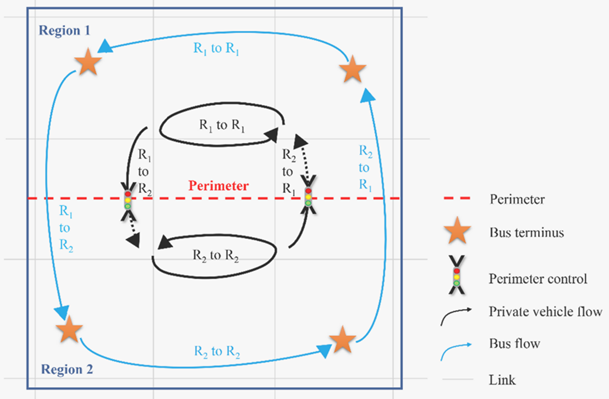
宏观建模
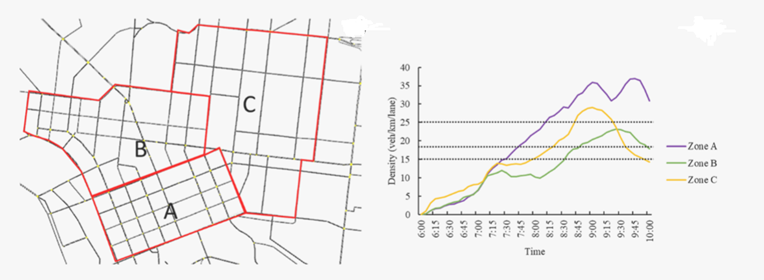
多区域协调管理和控制
准确的交通流预测使当局能够实施更有效的交通管理策略。通过预测拥堵情况,当局可以优化交通信号定时、调整车道配置,并实施动态路线引导系统,缓解交通拥堵,提高整体交通流畅度。深度学习模型可以提供交通模式、高峰时段和拥堵热点的见解,有助于更好地进行长期交通规划。城市规划者可以利用这些信息设计更高效的道路网络、公共交通系统和基础设施项目,以满足未来的交通需求。本项工作基于深度学习的模型方法,结合数据的时间序列特征和空间特征,构建了动态自适应卷积模型。实验结果表明,所提出的模型的预测结果优于现有模型。
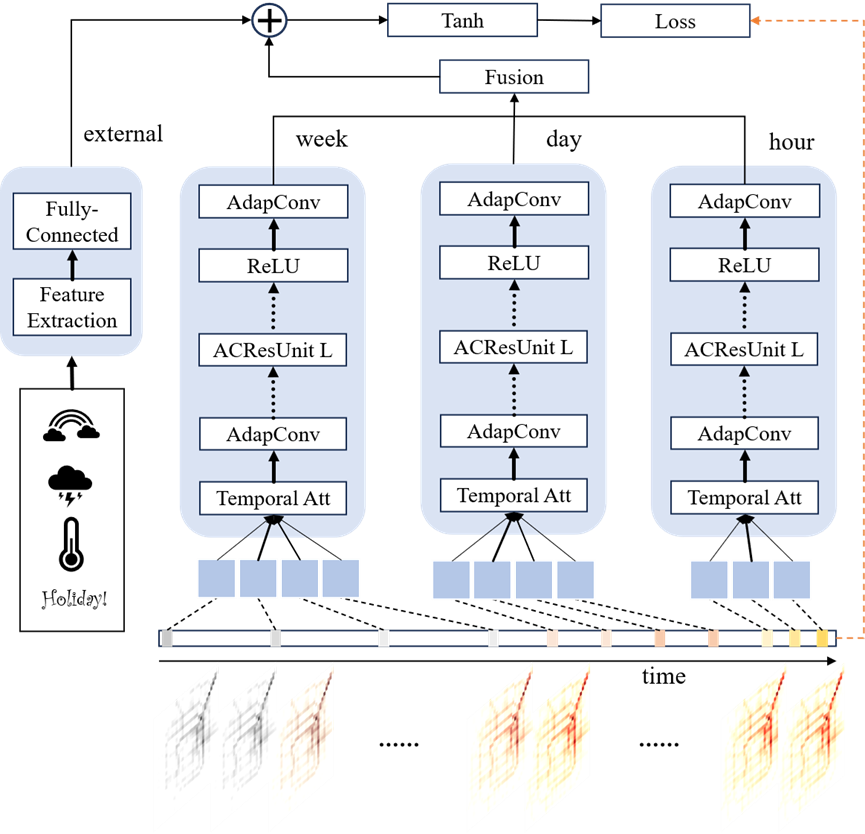
模型框架
根据历史交通数据和其他外部因素,预测未来5分钟到15分钟的路网交通流量。采用深度学习模型,可以捕捉到数据的时间序列特征、交通流量的周期性和非线性关系,并利用该知识进行未来交通流量的预测,从而提高预测的准确性。在研究中,采用卷积神经网络 (CNN) 等深度学习模型作为预测器,此外,还可以加入注意力机制和模型融合等技术,提高预测的精度和鲁棒性。
模型框架
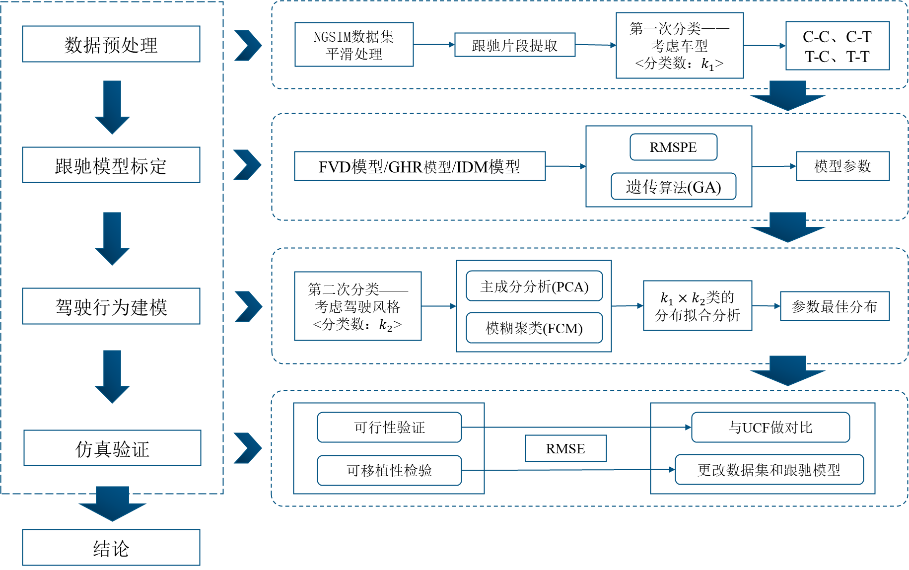
驾驶行为预测交通管理与优化的一个重要前提,为了更准确的描述人类驾驶员的驾驶行为,团队研究在驾驶行为建模中同时考虑引导车辆-跟驰车辆组成类型和驾驶风格的异质性,形成一个完整的框架。使用标定的跟驰模型参数作为驾驶行为的分析依据,并应用严格的数据挖掘和统计学方法来识别异质性并校准所提出的分类跟驰模型。通过实验分析,表明我们所提出的方法能够大大提高跟驰模型预测驾驶行为的准确度。
车辆跟驰行为异质性建模
通过主成分分析和聚类分析方法,获得驾驶风格的聚类结果。可以清楚地将驾驶风格分为正常型、激进型和温和型三种。从模型的验证结果可以看出所提出的模型能够明显降低各种驾驶风格行为预测的误差,REMS值由0.7降低至0.4左右。
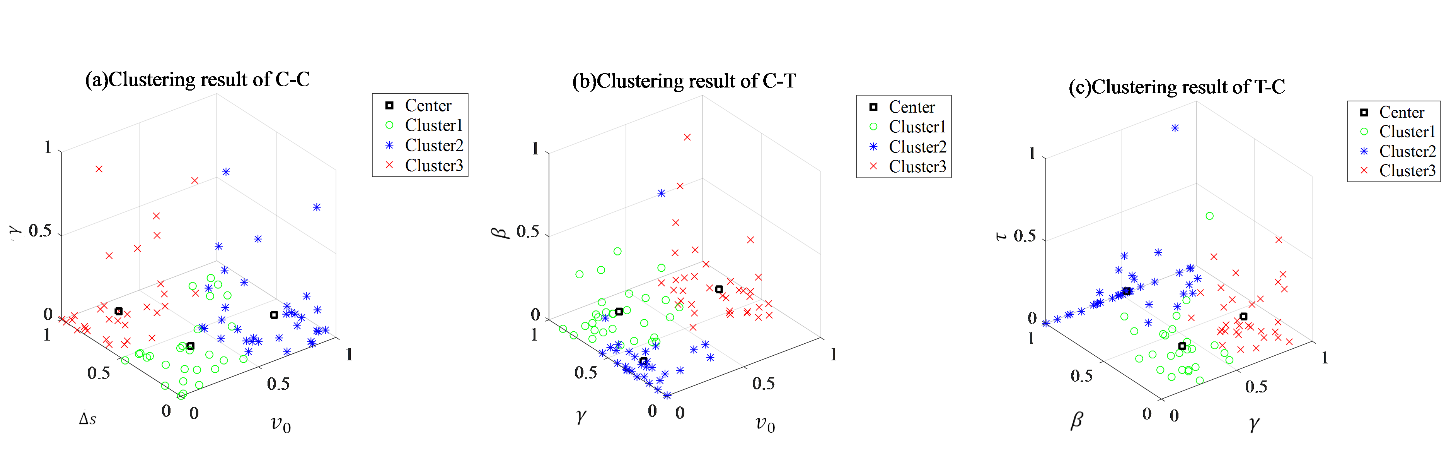
驾驶风格聚类结果
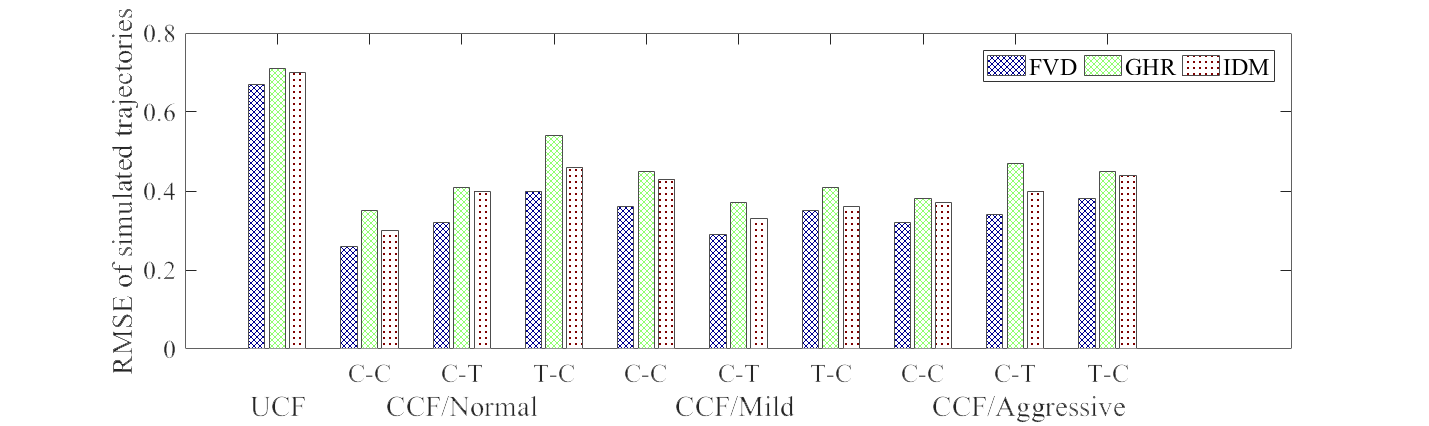
驾驶行为预测的优化程度
在研:
1. 国家重点研发计划课题:场景目标导向的交通组织与控制协同优化方法, 2019.02-2021.12
2. 国家自然科学基金委优秀青年基金:城市道路交通设计与优化(51722809),2018/01-2020/12
3. 上海-科委,交通拥堵智能主动管控与评估技术研究,2019.10-2021.09
4.
上海-科委,大型会展道路交通圈层协同调控与出行预约技术研究,2020.09-2023.08
已结题:
1. 霍英东青年教师基金:交叉口新型通行模式适应性与优化方法研究(151076),2016.3-2019.3
2. 国家自然科学基金(国际合作交流项目):城镇化过程中的道路交通设计与优化(5161101471),2017/01-2017/12
3. 中央高校基本科研业务费专项资金项目:非常规平面信号交叉口优化控制技术,2016.1-2016.12
4. 上海市浦江人才计划:基于网络态势信息的城市道路交叉口群过饱和控制理论与方法研究(14PJD033),2014.9-2016.8
5. 江苏省现代城市交通技术协同创新中心项目:不确定需求下城市道路交叉口优化设计方法研究,2014.6-2017.6
6. 国家自然科学基金项目:交叉口排队溢流主动控制理论与优化方法研究(51178345), 2012.1-2015.12
7. 国家自然科学基金项目:专用道优先控制与公交调度协调优化方法研究”(50808142),2009.1-2011.12
8. 车路协同与安全控制北京市重点实验室开放课题:面向节能减排的车队速度引导与信号配时协调优化方法研究,2013.5-2014.5
9. 交通运输部西部项目子课题:快速公交系统信号优先与智能调度技术研究,2011.1-2013.12
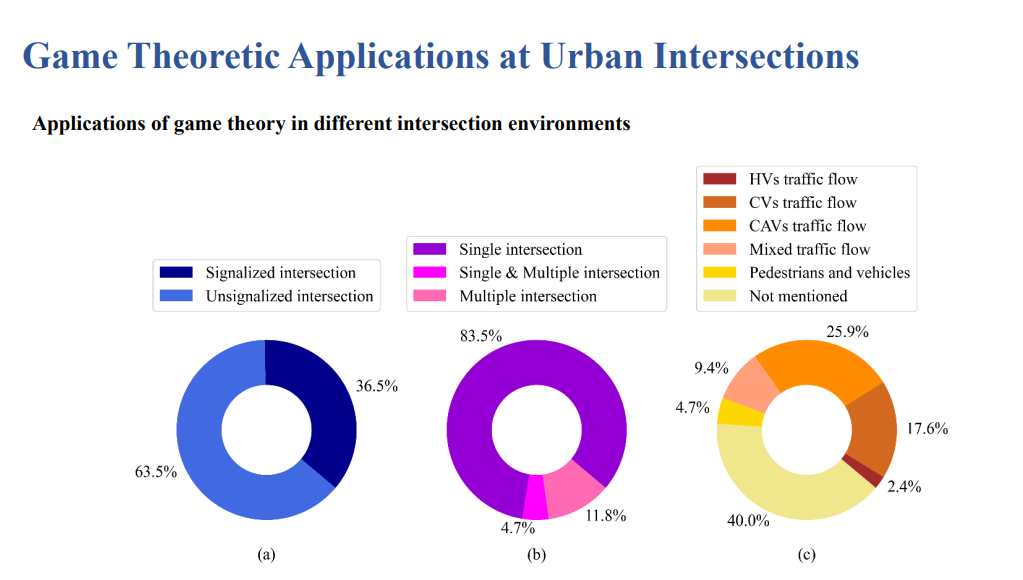
博弈论应用于交叉口