准确预测周围人类驾驶车辆的轨迹是保证自动驾驶车辆能够合理规划自身轨迹的关键。为了提升短时轨迹预测的准确度,本项工作基于深度学习的模型方法,结合数据的时间序列特征和空间上相邻车辆之间的关系构建模型。实验结果表明,所提出的模型的预测结果显著优于现有模型,在预测时域为5s时,车辆轨迹的预测误差(REMS)可降低约15%。

模型框架
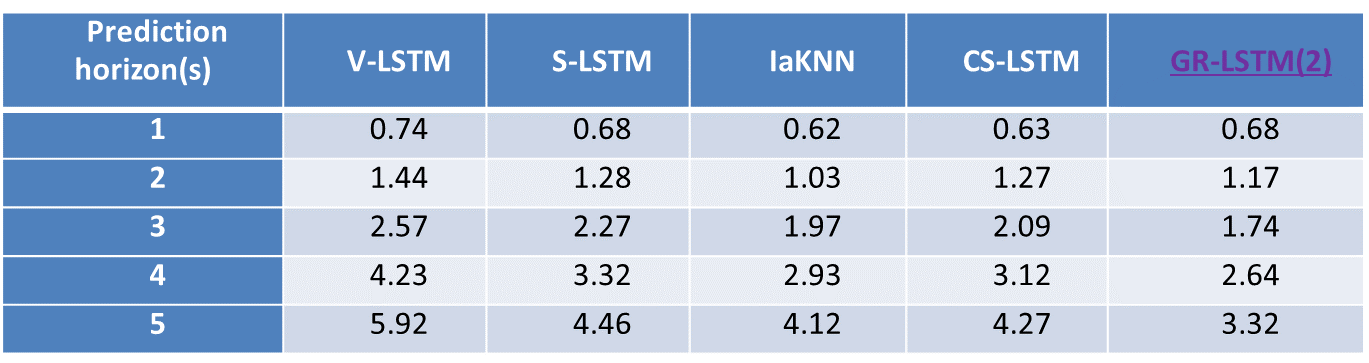
预测误差分析

准确预测周围人类驾驶车辆的轨迹是保证自动驾驶车辆能够合理规划自身轨迹的关键。为了提升短时轨迹预测的准确度,本项工作基于深度学习的模型方法,结合数据的时间序列特征和空间上相邻车辆之间的关系构建模型。实验结果表明,所提出的模型的预测结果显著优于现有模型,在预测时域为5s时,车辆轨迹的预测误差(REMS)可降低约15%。
模型框架
预测误差分析
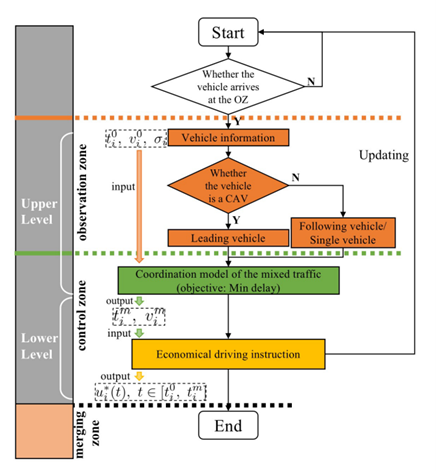
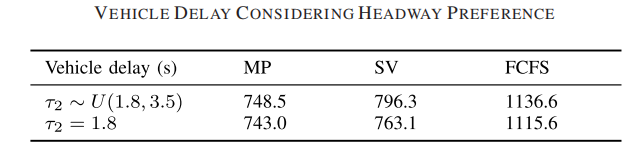
无信号交叉口的车辆编队协同控制是当前的研究热点。在智能网联汽车与人工驾驶汽车的混合交通流条件下,为了提高交叉口的通行效率,本项工作提出了双层协调控制模型,上层模型通过车辆编队控制和冲突行为的动态优先级控制来最小化总延误,下层模型通过优化受上层动态优先级控制的速度曲线来使能耗最小。通过对仿真结果的分析及与现有的策略(FCFS)相比,所提出的方法在减小总延误的表现上优于最先进的控制器。
为了提高自动驾驶汽车路径跟踪的效率和舒适度,团队提出了一种新型的变速曲线模型预测控制(MPC)方法,用于自动驾驶汽车中基于主动转向系统的纵向和横向集成控制。控制目标是尽可能接近目标路径,同时最大限度地减少与可变纵向速度的偏差,并提高跟踪过程中的舒适性和燃油效率。仿真结果表明,该方法将横向跟踪误差降低了75%,最大横向加速度和偏航角率分别降低了80%和65%。

横纵向耦合控制器结构
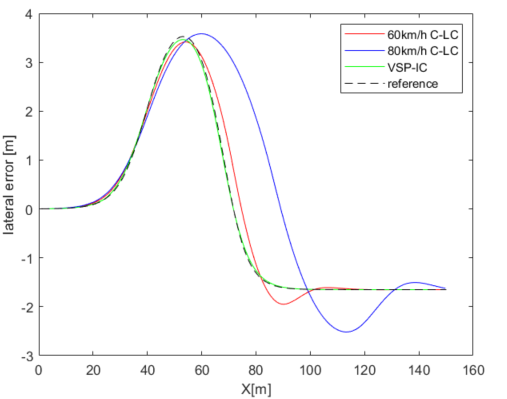
各种跟踪条件下的横向误差比较
由于道路条件多变和数据采集成本高昂,基于物理和数据驱动的模型都面临着稀疏数据的重大挑战。为了解决这个问题,提出了一种将单轨模型与物理神经网络方法相结合的车辆模型。PINN-VM利用模型驱动和数据驱动方法的优势来实现精确的车辆动力学建模。与其他模型相比,PINN-VM的性能更好,尤其是在数据稀疏的情况下。使用CarSim和Simulink进行仿真实验的结构表明,在不同摩擦系数的中高速大曲率条件下,该控制器提高了轨迹跟踪的性能和侧向稳定性。
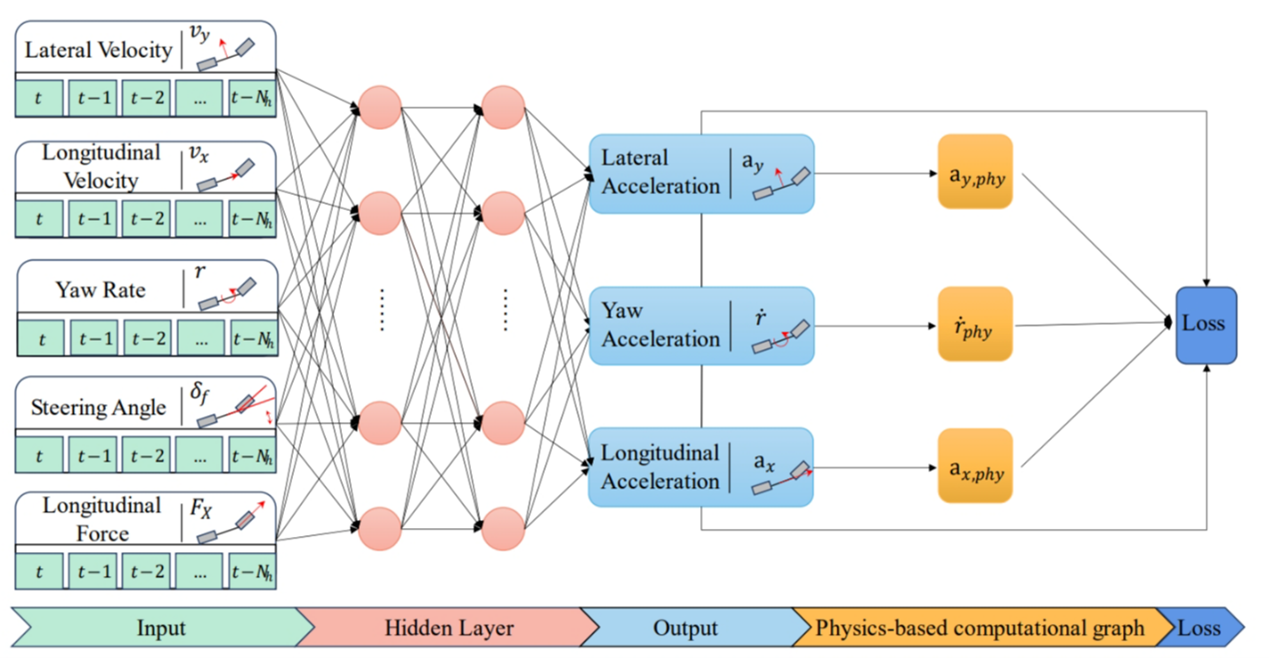
PINN-VM模型框架
智能网联汽车可以实现全局化的环境感知,并且可以实现有效的协同决策控制使交通系统更加安全、有序、高效、节能地运行。然而,智能网联汽车在进行状态信息交互的同时,也面临着信息安全与隐私保护层面的网络攻击威胁。在现有研究基础上,团队创新性地建立了考虑网络攻击的智能网联汽车主动防御控制策略。根据各种攻击造成的数据丢失、篡改情况,利用数据清洗、去噪、填充的统计学方法和车辆轨迹预测的相关技术给出相对合理的预测值辅助决策,实现能够完成数据采集、车辆通信、攻击检测与识别、主动防御、决策校正一体化的智能网联汽车控制策略。

长延时(4s)攻击下的“乱序”现象

网络攻击引起“乱序”现象导致碰撞
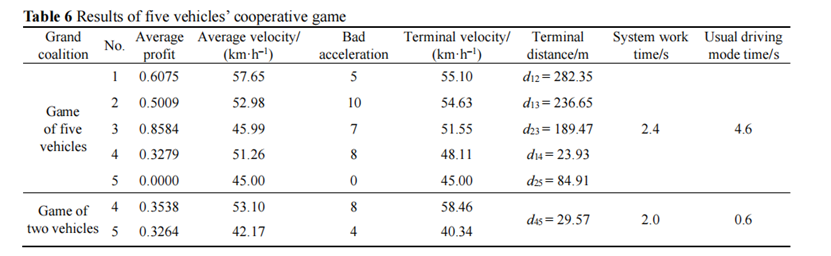
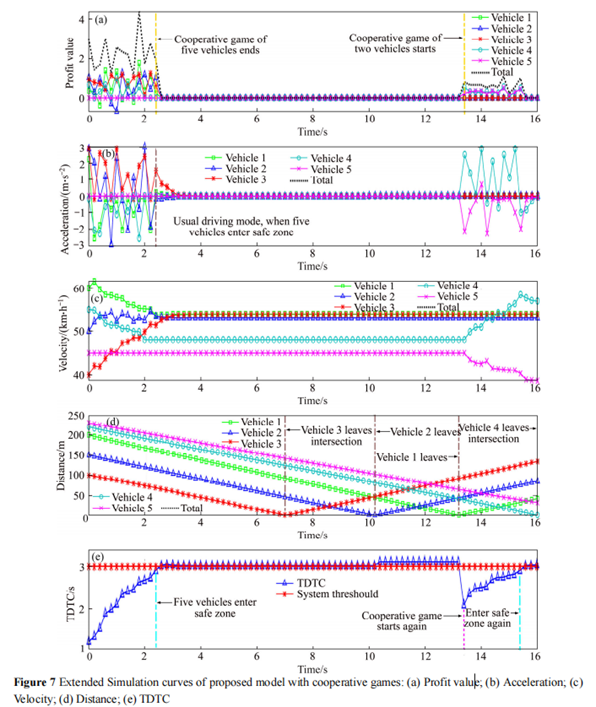
无信号交叉口的协同驾驶对于行车安全至关重要,针对一定数量的车辆从不同方向驶入无信号交叉口时存在的潜在碰撞风险,本项工作提出了一种基于合作博弈论的驾驶模型,以车辆的安全性、快速性、舒适性为指标构建交叉口车辆行驶过程的特征函数并考虑驾驶员特征。最后,通过一系列的仿真实验,验证了该模型的有效性。
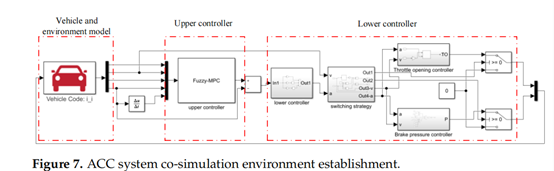
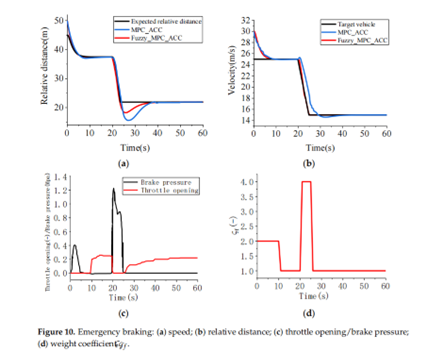
高级驾驶辅助系统(ADAS)目前在汽车上得到了广泛的应用。其中,自适应巡航控制(ACC)系统是最受欢迎的ADAS之一。本项工作为了提高ACC系统在复杂工况下的行驶性能,提出了一种模糊MPC算法。基于两车纵向运动学模型,对在线变权模糊MPC算法进行了仿真。结果表明,与传统MPC算法相比,模糊MPC算法在行驶条件变化时能够更快、更稳定地跟踪车辆,具有更好的安全性、舒适性和燃油经济性。
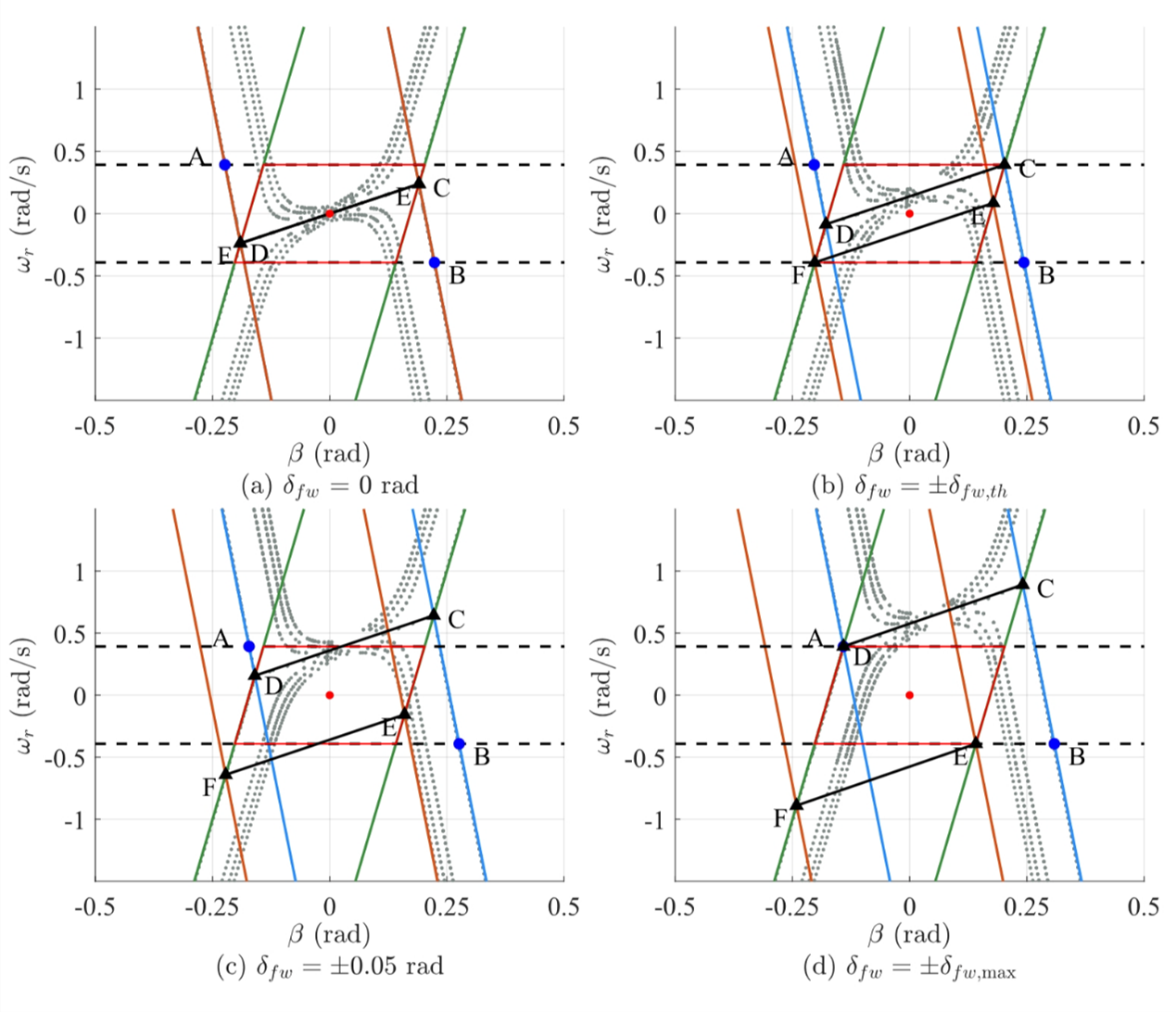
智能网联车辆运动控制不可避免会受到系统内外部扰动影响。本工作针对车辆在操纵极限处受扰动影响的智能网联车运动控制,提出以一种基于Tube-base MPC控制策略的轨迹跟踪控制。首先,为了保证智能网联车辆在操纵极限的横向稳定性,设计一种动态横向稳定性网络,其次为了处理系统外部风阻、内部系统未建模误差扰动,采用一种鲁棒模型预测控制(Tube-based MPC)来保证智能网联车辆的运动控制性能。
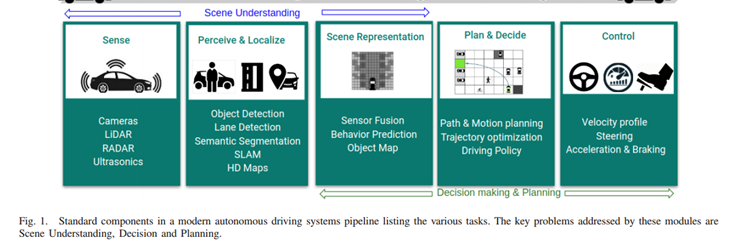
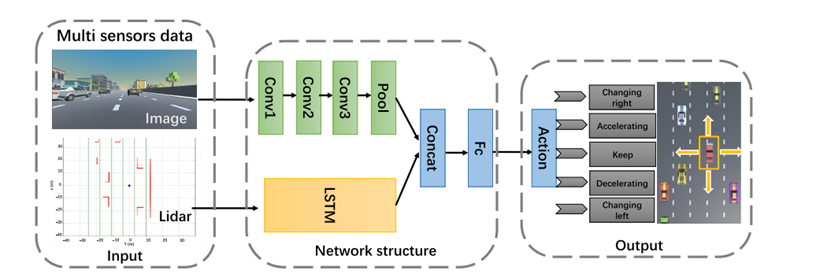
随着深度表示学习的发展,强化学习(RL)领域已经成为一个强大的学习框架,现在能够在高维环境中学习复杂的策略。自动驾驶场景涉及交互主体,需要协商和动态决策,适合强化学习的应用。与传统的基于规则的算法相比,自动驾驶中的深度强化学习方法能够减少车辆对驾驶环境的响应时间,充分发挥自动驾驶的优势。
对交叉口进行有效管理是改善整个城市道路交通问题的关键。在智能网联环境下,针对十字型无信号交叉口的交通场景,本项工作利用替代图构建交叉口一体化模型,将上层车辆通行次序问题与下层车辆轨迹优化问题耦合,实现在保证车辆行驶安全的前提下,让车辆以稳定的状态通过交叉口的同时,也能够实现提高交叉口通行效率、提高乘客舒适度、降低能耗的目标。
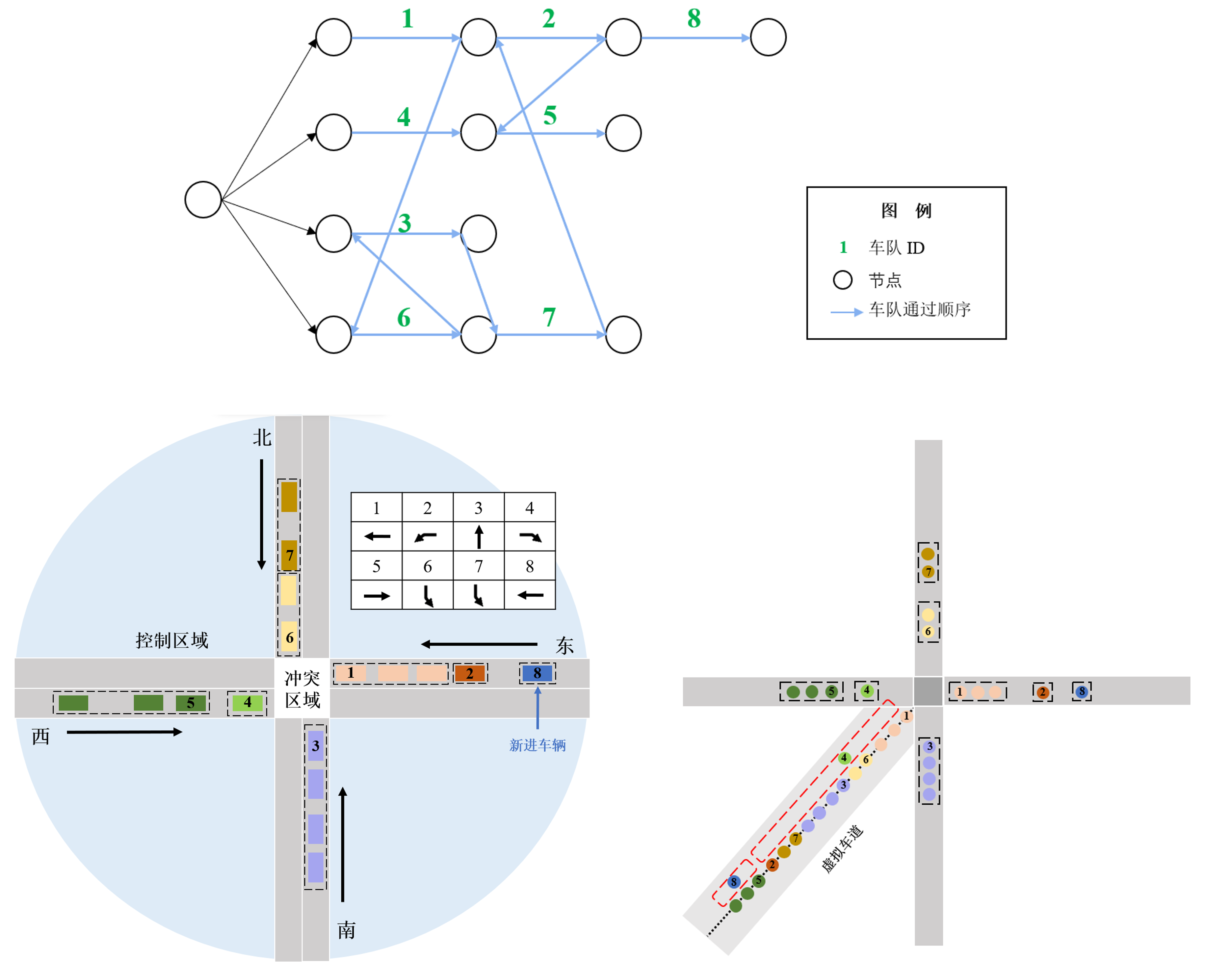
场景分析
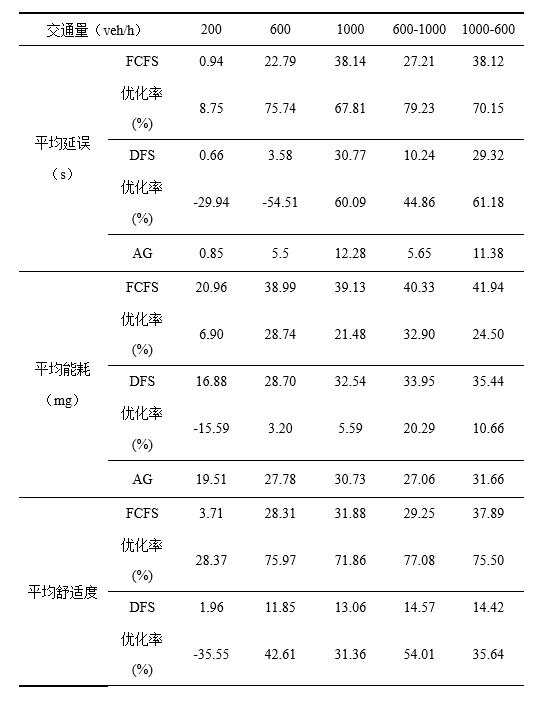
仿真结果
针对混合交通环境,为自动驾驶专用车道与普通车道交织区进行动态换道轨迹规划。以被控主车周围存在4辆车为例,分析主车与周围车辆间的运动学关系,以舒适和高效为目标,建立换道全过程避撞的轨迹规划模型,并针对周围车辆驾驶行为变化实时更新。在此基础上考虑到交织区两侧不同的车辆类型,建立基于多车协同的车辆动态换道轨迹规划模型。并针对交织区域的物理长度限制,计算强制换道最小区域,设计交织区域强制换道机制,完成固定距离强制换道,获取最优换道轨迹。

模型框架
协同自适应巡航系统(CACC)是一个基于ACC和车间通信网络的车队控制系统,该系统允许车队车辆进行车间通信,并以协调的速度安全行驶。与ACC相比,CACC可以采取更小的车头时距策略,并在交通吞吐量、乘客舒适性和跟踪效率方面具有更好的性能。

基于模型预测控制的ACC上层控制算法
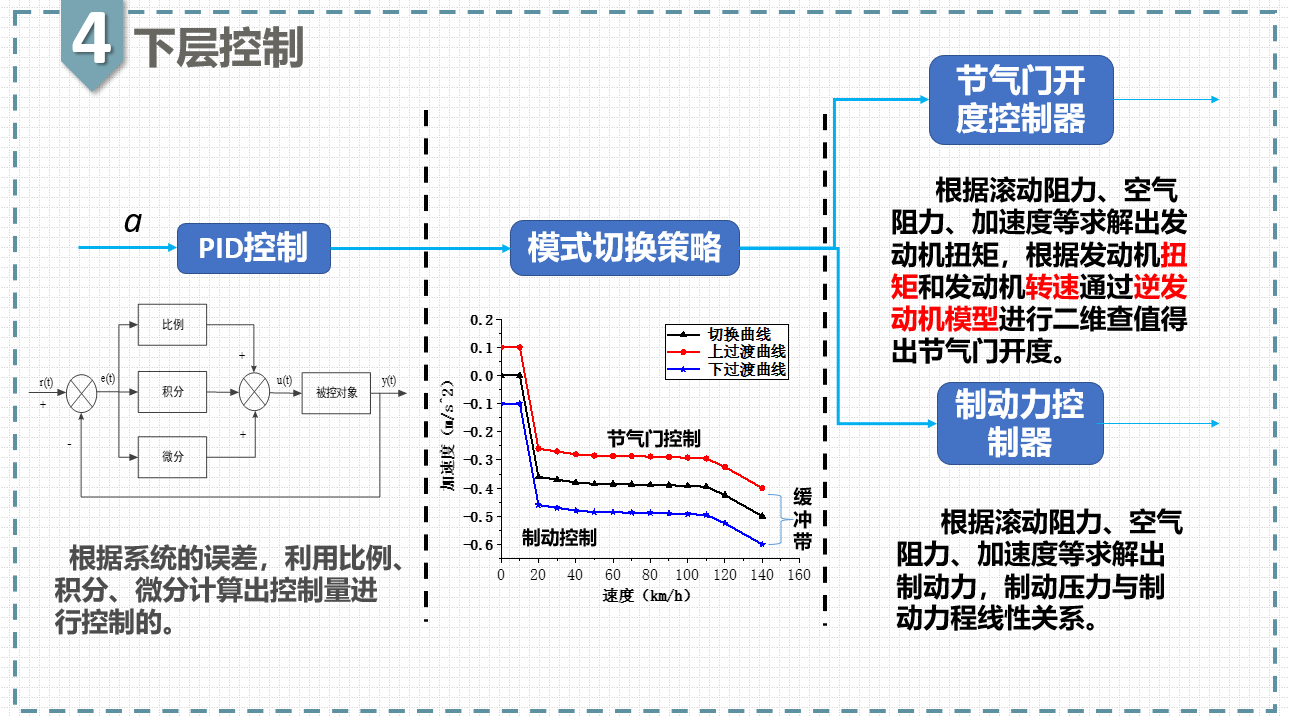
下层控制

联合仿真

联系电话:13568919613
管理员邮箱:chaowang@my.swjtu.edu.cn
详细地址:四川省成都市郫都区犀安路999号
邮政编码:611700

版权归西南交通大学未来交通实验室所有 All rights reserved.