最近,WAVES课题组硕士研究生张帅飞同学在IEEE DDCLS’24会议上发表了一篇论文“Trajectory Tracking Control for Autonomous Vehicles with Physics-informed Neural Network Vehicle Model”,提出了一种新的车辆动力学建模方法,旨在解决无人驾驶车辆轨迹跟踪控制中的关键问题。考虑道路条件的多变性和数据采集成本高昂,无论是基于物理的模型还是数据驱动的模型都面临着稀疏数据的重大挑战。
为了解决这一问题,该研究提出了一种结合了单轨动力学模型和物理信息神经网络方法的车辆模型。首先,在基于物理的计算图中对单轨模型进行编码,以识别物理模型中的关键参数。利用这些参数对单轨模型进行校准,再次将其编码为基于物理的计算图,设计了一个用于车辆动力学建模的物理信息神经网络(PINN-VM)。PINN-VM充分利用了模型驱动和数据驱动方法的优势,实现了准确的车辆动力学建模。
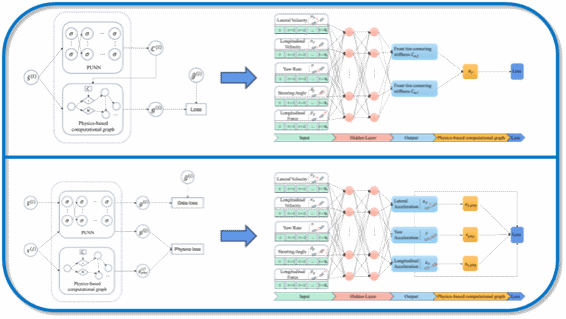
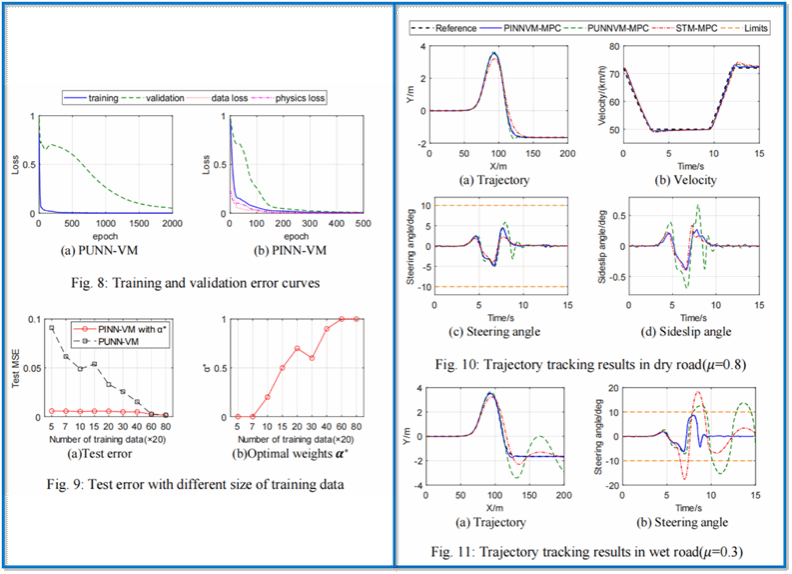
最后,PINN-VM被纳入一个新颖的模型预测控制框架中,用于设计轨迹跟踪控制器。使用CarSim和Simulink进行的模拟实验表明,所提出的控制器在中高速大曲率条件下,以及不同摩擦系数下,提升了轨迹跟踪性能和横向稳定性。
撰稿人:张帅飞


